


1.د لوړې برنامې لومړۍ خپرونه - دقیقا تعامل روبوټ.
نوی پوهیدونکی روبوټ M - 10ID / 10L به په لومړي ځل په چین کې د لومړي ځل لپاره پرانستل شي! م - 10 10id / 10l کولی شي د 10 کیلو ګرامه ترلاسه کړي، د بیان کولو درست ± 0.03ms تر 1636m6m پورې تکرار کړئ. د ځانګړي کیریټ ډرایو میکانیزم سره، د لوړې اناتر حرکت ځانګړتیاوې احساس کیدی شي. روبوټ د کیبل په توګه جوړ شوي - په نښه کې، لوړ سخت لاس دی د روبوټ سیسټم کې لوړ - سرعت او د تولید موثریت ته وده ورکوي.

2. د موټرو چیسسي د څوکیو برخې
دوه ګونی د ارقام 2D لید سیسټم کاري پا using ه په اتوماتیکسیټ او دقیق ډول موقعیت ورکوي، او د روبوټ د بارولو لپاره دقیق دی. د ویلډینګ پروسې په جریان کې، موقعیت د روبوټ سره همکاري کوي. د ویلډینګ مشعل د موقعیت او زاویه په پام کې نیولو پرته، د لودین تسکره د لودیځ ویلډینګ سرعت سره مساوي وي.
3. د پلیټ ویلډینګ.
په کانټینر او ځانګړي هدف لرونکي موټرو صنعت، مؤثر او هوښیار پلیټ ویلډینګ د فینک لیزر انعطاف ټیکنالوژۍ لخوا احساس کیدی شي. د خارجل شوي پلیټ کارډول ګیدییس د لیزر لید ټیکنالوژۍ لخوا موقعیت لري او سکین شوی دی، کوم چې د کارپورټ موقعیت دقت کموي. په ورته وخت کې، دا پرته له تدریس ویلډ ټریک د تدریجي پلیټ پیرودونکي مختلف مشخصاتو ته تطابق ورکول، او د کار موندنې تعصب اړتیا کموي.

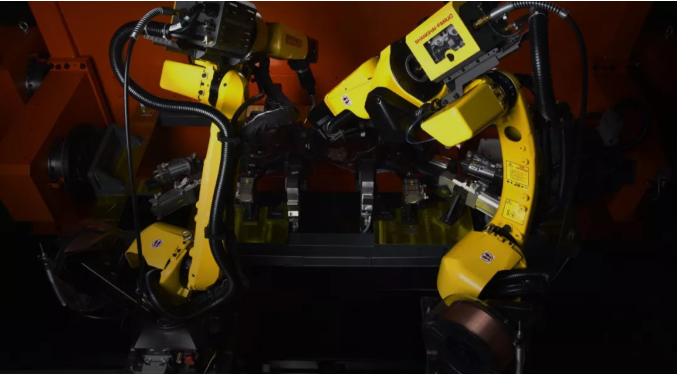
4. نیفریشن ترتیب، موقعیت او ویلډ کول.
د لرلید ټیکنالوژۍ او هوښيارانو هوښیاري ټیکنالوژۍ کارول ترڅو لوړ کاري ځایونه بشپړ کړي، او د لوړ بارولو او پورته کولو، ترلاسه کولو لپاره، وړتیا او لوړ وي - د کیفیت ویلډینګ. روبوټ د 3DA درې مخونو له لارې د بلک کارولو مختلف مشخصاتو اتوماتیک ترتیب کولو او اتوماتیک بارولو څخه ساتي درې - ابعادل پراخه ساحه سینسر د روبوټ سره خورا مدغم کیږي، او د روبوټ ښوونکي کولی شي په مستقیم ډول د لید سیسټم وګوري او د لید سیسټم د ډیکینګ او ساتنې لپاره خورا اسانه وي.

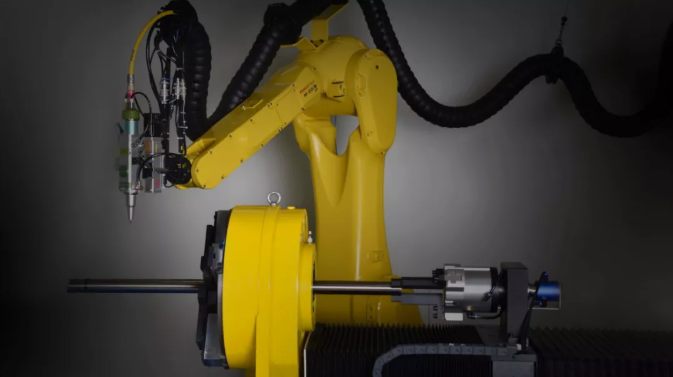
5. د پایپ فټینګ قلم کول.
فنګس به د هارډویر صنعت کې د پایپونو لپاره موثر پریښتونو حل راشي. د پایپ فټینګ آمری نصب شوي د پایپ کولو فاکمې څانګې کې رامینځته شوی چې په اتوماتيک ډول د پیل پروګرام رامینځته کولی شي. د تغذیه کولو میکانیزم د فنګس خدمتو موټرو موټرو لخوا پرمخ وړل کیږي، او روبوټ د پایپ د تقویت کولو کرښه احساس کولو سره تړاو لري.
د پوسټ وخت: جولای - 19 - 2021
د پوسټ وخت: 2021 - 07 - 19 11:01:53